

3D Reconstruction
Knowing the 3D structure of a scene provides valuable information for image analysis and understanding. Our group works on the reconstruction of 3D models from video sequences. We focus on the research of robust methods for use in uncontrolled environments.
Pattern Recognition (Proc. DAGM), Springer, LNCS, 2012
Aiming for easy and robust reconstruction with standard camcorders, this work introduces a close coupling between sparse bundle adjustment and dense multi-view reconstruction. The method introduces surface constraints by the sparse point cloud and an implicit loop closing via the dense surface.

IEEE International Conference on Computer Vision (ICCV), Dec 2013
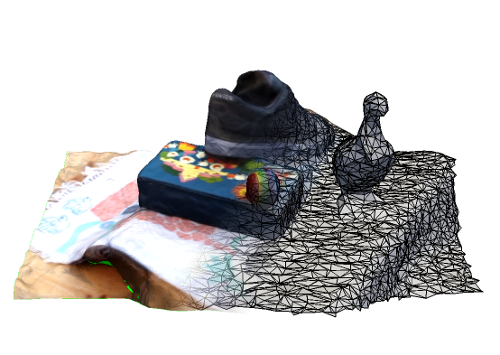
Thin flat surface cannot be modeled efficiently with grid based methods. In this work we propose a regularized point cloud representation that allows reconstruction of thin objects, such as sign posts, plants, etc.


IEEE International Conference on Computer Vision (ICCV), 2015
In this work, we elaborate on the fusion of depth maps which show different levels of detail of the scene. This allows to have a coarse coverage of the scene from images taking from far away while providing full detail of close-up parts. We use an efficient finite element method to represent the scene.
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2017
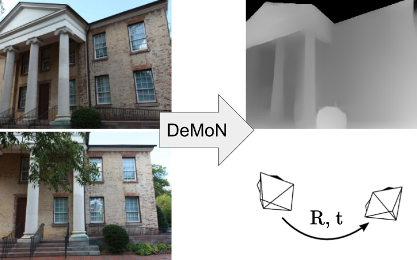
We developed a deep network that, for the first time, allows end-to-end learning of two-frame structure from motion. The network takes two frames as input and yields the depth map and the camera motion between the two frames. In contrast to classical structure from motion techniques, the network falls back to single-image cues if the camera does not move.
Demo 3D Reconstructions from Videos
The left column shows the input video taken with a commodity hand-held camera. The right column shows the corresponding reconstructed 3D model.
| Input Sequence | Reconstruction |