| Veranstaltunstitel: |
Softwarepraktikum WS 01/02 (4 SWS): Schach-Roboter |
|---|---|
| Verantwortlich: | Lehrstuhl für Mustererkennung und Bildverarbeitung und Lehrstuhl für Graphische Datenverarbeitung. |
| Zeit: | Mittwochs, 14.00 - 18.00 Uhr |
| Ort: | Geb. 52, SR 02-005 (Linux-Pool LMB) |
| Mitwirkung: | Christoph Keller, Jörg Mechnich, Jean-Sébastien Pierrard, Olaf Ronneberger |
| Adressaten: | Studenten der Informatik, Mathematik, Physik, Mikrosystemtechnik oder Biologie |
| Voraussetzungen: | Kenntnisse einer objektorientierten Programmiersprache (z.B. Java) werden vorausgesetzt. Grundkenntnisse in C / C++ sind wünschenswert, aber nicht erforderlich. |
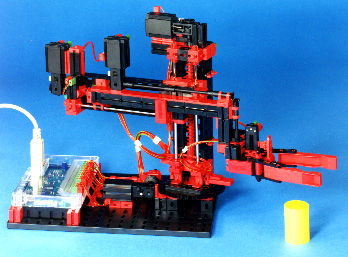
| Beschreibung: | In diesem Praktikum sollen durch Implementation eines größeren
Projektes Grundlagen der Softwareentwicklung vermittelt werden. Ein
Fischertechnik-Roboterarm und eine digitale Kamera sollen dazu
verwendet werden, rechner-gesteuert Brettspiele (z.B. Schach,
Mühle, Backgammon, Dame) mit einem menschlichen Gegner zu spielen.
Am Ende sollen folgende Module, die über einen einfachen
Netzwerk-Layer miteinander beliebig kombiniert werden können,
stehen:
|
| Inhalt: | Zu Beginn des Praktikums findet ein kompakter C++-Kurs statt.
In diesem sollen die Prinzipien der C++ Programmierung anhand der
Unterschiede zu Java und spezieller Eigenheiten (z.B. Templates)
vermittelt werden. Außerdem werden die zu benutzenden Bibliotheken
Qt und OpenGL vorgestellt. Während des Praktikums sollen folgende Teilaufgaben von den Studenten in kleinen Gruppen (2-3 Personen) bewältigt werden:
|
| Lernziele: | Umgang mit Werkzeugen, objektorientiertes Programmieren, generisches Programmieren, Multi-Threading, Arbeit in Kleingruppen, Dokumentation, Versions-Kontrolle und Präsentation der Programme |
| Programmiersprache: | ANSI-C++ (Bibliotheken: STL, Qt, OpenGL und CommonC++) |
| Betriebssystem/Plattform: | Linux |
| Werkzeuge: | gcc, make, emacs, vi, CVS, gdb, doxygen |
| Kreditpunkte: | 6 |
| Prüfungsleistungen: |
|
| Vorbesprechung: | Mi, 17.10. 13.00-14.00 Uhr HS 026 |
| weitere Informationen: |