![]()
In
the framework of a cooperation project between the university of Freiburg,
institute of image processing and pattern recognition and the company INOS
GmbH, a real-time intelligent robotic system
is being developed, according to which objects of various kinds and shapes,
(mainly card-board boxes and sacks) piled on a platform, should be recognized,
grasped, unloaded and then neatly placed to a target platform. In some cases
the dimensions of the target objects should be calculated a well. We expect to
promote the system to the automobile and cargo distribution industry. Some
examples of the objects which we want to be able to recognize, along with the configurations frequently encountered at
target pallets, are depicted in figure 1.

Figure 1: Target Object
Configurations
In order to
solve this problem, we use an industrial robot from KUKA GmbH, as well as a
SICK LMS200 laser sensor attached on the hand of the robot. Note that the
sensor is placed on the forefront of a gripper, based on vacuum principles. The
robotic system is depicted in figure 4.
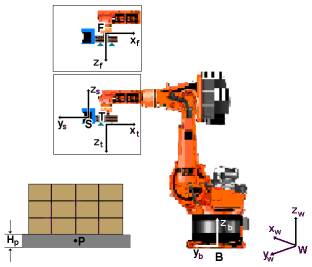
Figure 2: The Robotic System
Placing the sensor on the hand of the robot,
has the advantage that scene data can be efficiently acquired. The usage of the
laser sensor as a primary data acquisition tool, renders the system independent
of the environmental conditions. This is very important, since at the future
installation sites, the quality of environmental conditions are adverse.
Cameras will be used in a secondary manner.
According
to the concept described above, we have already implemented an initial system,
which manages to unload card board boxes, which are neatly placed on target
platforms as in figure 4. We have
employed an efficient edge detection algorithm for this purpose, which detects
boxes’ corners from the images of the laser sensor and assumes the boxes position in space. The figure 5a-d
illustrates the system’s operation.






Figure 3: The robotic System in
Action
We want now
to complete the construction of a system which manages to deal with arbitrary
configurations of objects. In this
respect, we move the robot’s hand parallel to the objects, having the sensor
pointing to the ground, so as an image of the upper surface of the objects to
be captured. For the configuration of figure 1, the acquired image is depicted
in figure 4.
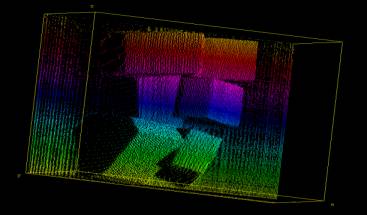
Figure 4:
Target Object Configuration
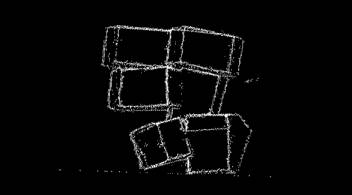
Figure 5: Edge map
Finally,
feature extractors are applied to the image in order to extract characteristics
which will allow for the formation of an hypothesis of the location of the
objects in the scene. For the card - board boxes case, such features could be
the boxes' vertices, which can be relatively easily extracted from the edge map
of figure 5.
We are looking
for two students who will help on the implementation and experimental
evaluation of this robotic system, either as assistants with payment, or
pursuing a diploma thesis. The candidates will have the opportunity to learn
the essentials of developing a state of the art industrial system, as well as
dealing with industrial robots. The candidates should be familiar with basic
knowledge of image processing and capable of programming in C or C++. The
knowledge of written and spoken English is necessary. But what is most
important is imagination and desire for creation! If you feel like having
the above qualifications then email us as soon as possible:
Corresponding person:
Dipl.-Ing. Dimitrios Katsoulas
Albert-Ludwigs-Universität
Freiburg
Lehrstuhl für Mustererkennung
und Bildverarbeitung.
Email: dkats@informatik.uni-freiburg.de
URL: http://lmb.informatik.uni-freiburg.de/people/dkats
![]()
Stellenangebote.
Zwei
Stellen für Diplom / Student Arbeiten oder Wissenschaftliche Hilfskräfte, sind ab
sofort zu besetzen. Was wir machen ist ein Kooperationsprojekt zwischen der
Firma INOS Automationssoftware GmbH und
des Lehrstuhles für Mustererkennung und Bildverarbeitung. Ziel des Projektes
ist die Entwicklung eines modularen
Systems mit dreidimensionaler Lage und Positionserkennung von unterschiedlichen, allgemeinen
Objektformen zum intelligenten, roboterunterstützten Depalletieren/Palletieren.
Dass heißt dass wir beim Programmieren eines Industriellen Roboter, einzelne
Objekte wie z.B. Boxen / Kisten, Flachbehälter und Säcke auf einer Palette
lageunabhängig zu erkennen, zu greifen und an anderer Stelle wieder abzulegen
versuchen. Die Ausweitung der zu greifenden Objekte auf Säcke als Vertreter von
Objekten mit variabler Struktur stellt einen zusätzlichen Schwierigkeitsgrad
dar. Mit dem neu zu entwickelnden Erkennungssystem soll es möglich sein, ein
Objekt in Echtzeit zu erkennen und zu greifen. Dieser Vorgang soll von dem
System in einer Zeitspanne bewerkstelligt werden, die auch ein Mensch für die
selbe Tätigkeit benötigt.
Adressaten:
Studenten der Informatik, Physik oder Mathematik mit ausreichenden Kenntnisse in C, C++.
Bei Interesse erhalten Sie
weitere Informationen bei:
Dipl.-Ing. Dimitrios Katsoulas
Albert-Ludwigs-Universität
Freiburg
Lehrstuhl für
Mustererkennung und Bildverarbeitung.
Email: dkats@informatik.uni-freiburg.de
URL: http://lmb.informatik.uni-freiburg.de/people/dkats